





















Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.

Shenzhen Kingsom Technology Co., Ltd.
상표: Kingsom
포장: 나무로되는 판지
생산력: 10000sets/year
수송: Ocean
원산지: 심천
지원에 대한 지원: Strong
인증 : CE,CCC,ROHS and ISO9001:2008
포트: Shenzhen Port
지불 유형: L/C,T/T,Paypal,Money Gram,Western Union
인 코텀: FOB,EXW
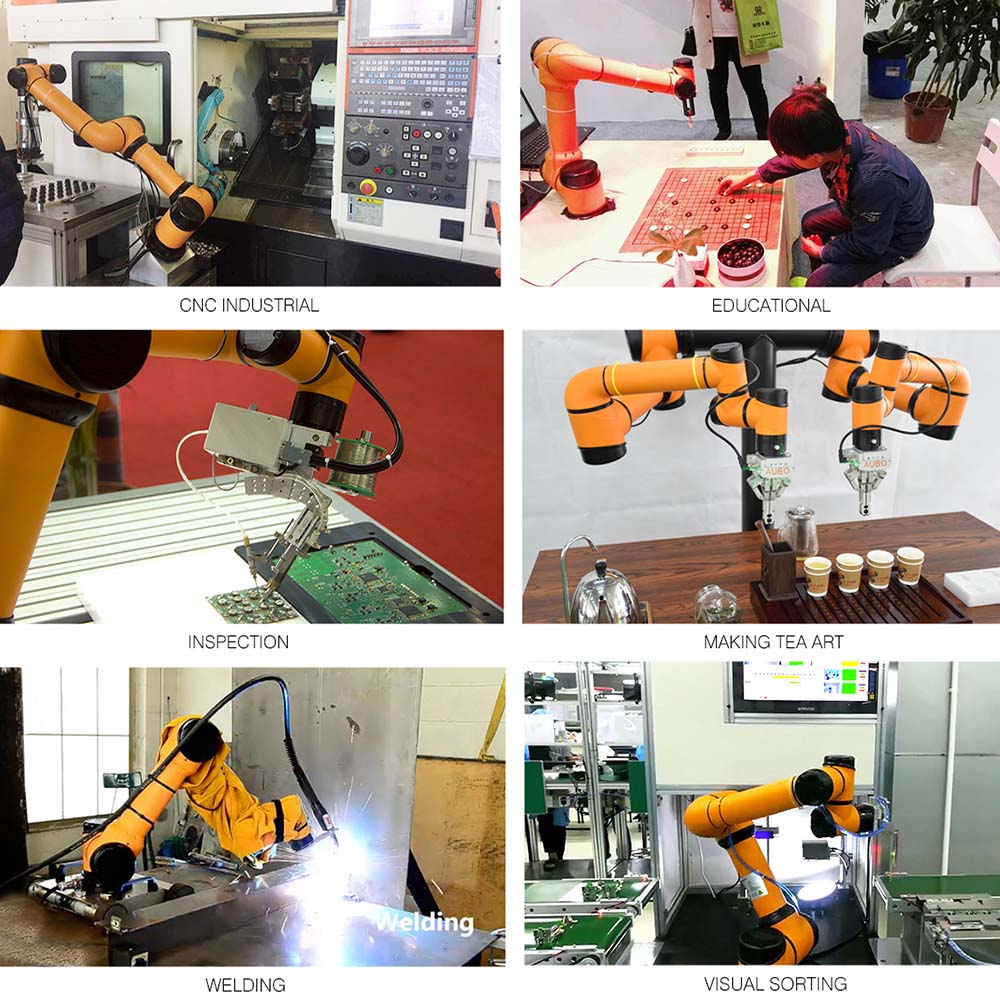
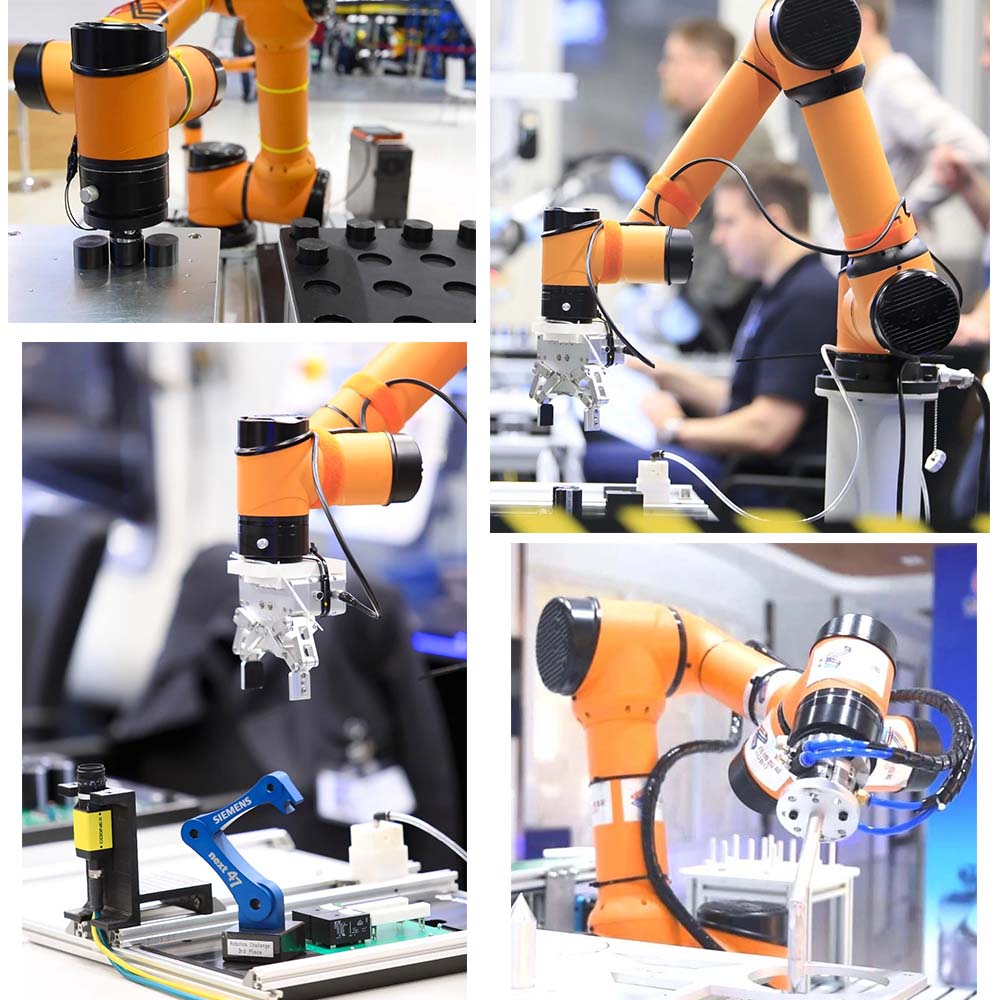
자동 CNC 6 축 산업용 로봇 암 조작기
단조 로봇 팔은 로봇 기술 분야에서 가장 널리 사용되는 자동화 기계 장치입니다. 산업 제조, 의료, 엔터테인먼트 서비스, 군사, 반도체 제조 및 우주 탐사에서 볼 수 있습니다. 모양은 다르지만 모두 공통된 특징을 가지고 있습니다. 즉, 명령을 받아들이고 작업을 위해 3 차원 (또는 2 차원) 공간에서 지점을 정확하게 찾을 수 있습니다.
단조 매니퓰레이터의 구성
작동 메커니즘 : 발톱, 손목, 팔, 기둥 및 보행 메커니즘이 포함됩니다.
1. 클로
단조 매니퓰레이터의 클램프와 유사하게 공작물을 클램프하는 부분입니다. 클램핑 클로의 형태는 인간의 손가락과 유사하며 클램핑 및 언 클램핑 동작이 있습니다.
2. 손목
클로와 암을 연결하고 클로를지지하며 클램핑 된 공작물의 공간 위치를 조정하는 부품입니다. 손목은 일반적으로 3 개의 피칭 동작, 좌우 스윙 및 자체 축을 중심으로 회전합니다. 일부 조작자는 손목이 없습니다.
3. 팔
클램핑 된 공작물, 클로 및 손목을지지하는 데 사용되는 구성 요소입니다. 특정 궤적에 따라 공간의 한 위치에서 다른 위치로 공작물을 이동할 수 있습니다. 일반적으로 팔은 전진 및 후진 확장, 상하 리프팅, 좌우 회전, 상하 스윙과 같은 움직임이 있습니다.
4. 기둥
팔을지지하는 부분입니다. 조작기의 기둥은 일반적으로 고정되어 있으며 때로는 필요로 인해 기둥이 이동식 기둥이라고 불리는 이동 가능하도록 설계 될 수도 있습니다.
5. 워킹 메커니즘
머니퓰레이터가 상대적으로 장거리 작업을 완료해야하는 경우 롤러 및 가이드 레일과 같은 보행 메커니즘을베이스에 설치하여 전체 기계의 움직임을 실현할 수 있습니다.
지성
1. 비전 시스템을 컨트롤러에 통합 할 수 있습니다.
2. 클라우드 플랫폼 관리 기반의 소프트웨어 시스템으로 원격 유지 보수, 장애 진단, 펌웨어 온라인 업그레이드를 실현합니다.
3.이 연구 로봇 플랫폼은 기업 연구실 및 학술 로봇 연구에 전 세계적으로 널리 사용됩니다.
모듈 식 디자인
1. 로봇은 사용자 요구 사항을 충족하기 위해 4 ~ 7 자유도를 갖도록 구성 할 수 있습니다.
2. 조인트 길이는 더 길거나 더 짧은 링크로 사용자 정의 할 수 있습니다.
Robot Arm Machine 외에도 당사는 Soldering Fume Extractor, Solder Paste Dispenser, Pneumatic Hand-held Screw Feeder, Automatic Screw Feeder와 같은 많은 제품을 보유하고 있습니다. 이러한 제품이 필요한 경우 당사에 연락하여 가능한 한 빨리 답변을 드리겠습니다.
기술 사양
| Controlled Axed DoF | 6 axes (J1, J2, J3, J4, J5, J6) J7max |
| Reach | 924 mm |
| Working Range | 880 mm |
| Payload | 5kg |
| Weight | 24kg |
| Footprint | 172 mm diameter |
| Collabortative Operation |
Safety monitored stop, speed and separation monitoring, hand guid operation, power and force limiting design. |
| Certifications |
ISO 10218-1:2011, EN 60204-1:2006 +A1:2009 ISO 12100:2010, ISO 13849-1:2008, CE |
| Repeatability | ±0.02mm |
| Linear Velocity | 2.8 m/s adjustable |
| Power Consumption | 200 watts typical application |
| Materials | Aluminum, Steel, Plastic |
| Ambient Humidity | Normal 75% RH or less without frost, or dew, 85% RH short term |
| Ambient Temperature | 0 to 45 degrees Celsius |
| IP Classification of Robot | IP 54 |
| Programing |
Teach Pendant with user interface, guide to teach, ROS compatibility through an API, Lua, Python. |
| Communication | CAN Bus |
| Motor Type | Harmonic drive 48 Volt |
| Installation Orientation | Any celling, Floor, Wall |




| Axis | Working Range | MAximun Speed | Max Joint Moments |
| J1 axis rotation base | (+/-)175° | 150°/sec | 207Nm |
| J2 axis rotation shoulder | (+/-)175° | 150°/sec | 207Nm |
| J3 axis rotation elbow | (+/-)175° | 150°/sec | 207Nm |
| J4 axis wrist rotation | (+/-)175° | 180°/sec | 34Nm |
| J5 axis wrist swing | (+/-)175° | 180°/sec | 34Nm |
| J6 axis wrist rotation | (+/-)175° | 180°/sec | 34Nm |

| Dimensions (LxWxH) | 683x220x622 mm | I/O Ports | User I/O | Safety I/O | |
| Weight | 20kg | Digital in | 16 | 16 | |
| Cabling | 5m | Digital Out | 16 | 16 | |
| Colour | Black | Analog in | 4 | - | |
| Communication | TCP/IP, Modbus-RTU/TCP | Analog out | 4 | - | |
| Power supply | 100-240 VAC, 50-60Hz | Power input | 24 Volts | ||
| IP Classification | IP54 | Power output | 3A | ||


제품 디렉토리 : 로봇 팔 기계 > Kingsom 새로운 도착 산업 단조 조작기 로봇 팔




Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.